

Проїде чи не проїде? Відповідь на це питання можна отримати шляхом аналізу траєкторій проходження шляху транспортного засобу в умовах обмеженого простору.
Аналіз траєкторій потрібен як під час розробки рішень дорожньо-транспортної інфраструктури, так і для планування перевезень негабаритних вантажів.
Для уможливлення предметного аналізу траєкторій проходження шляху в умовах обмеженого необхідне відтворення самого руху чи геометричних залежностей при маневруванні відповідного транспортного засобу в відповідних умовах. Здійснити це можливо як фізичним моделюванням на масштабних моделях, так і сучаснішим ефективнішим чином з застосуванням комп’ютерного програмного забезпечення. До таких програм належать: AutoTurn, Heavygoods, AutoPath, Autodesk Vehicle Tracking тощо.
У статті ми розглянемо методологію, яка при значно більшій трудомісткості має перевагу для будь-якого інженера без спеціального софту, але з програмним забезпеченням систем автоматизованого проєктування: AutoCAD CIVIL 3D, AutoCad, Autodesk Inventor, FreeCad тощо.
Як ви могли помітити, сумісність не обмежується CAD-програмами цивільного спрямування, тому дана методика доречна для проведення аналізу в одиничних випадках спеціалістами значно ширшого спектру спеціальностей:
планування руху транспортних засобів по виробничим підприємствам, планування проїздів на територіях з приватними будинками,
орієнтовний аналіз зайнятого легкорейковим транспортом простору в громадських просторах, розробка та аналіз специфічних транспортних причепів тощо.
Методика полягає в відтворенні взаємних геометричних залежностей, властивих траєкторіям руху відповідних транспортних засобів в реальних умовах. Найголовнішими залежностями можна назвати дотичність розташування точки балансу некерованих вісей (в деяких випадках при повороті відбувається деякий бічний зсув вісей при розташуванні одразу кількох неповоротних вісей, місце розташування точки балансу залежить від розподілу сили зчеплення між колесами відповідних вісей) до спрямування коліс цих вісей. В той же час зазвичай нормальним режимом експлуатації вважається відсутність проковзування коліс керованих вісей, що означає також дотичність умовної точки керованих вісей (напрямок руху кожного колеса керованих вісей знаходиться перпендикулярно до радіальної проєкції центру кривизни кривої траєкторії руху узальненої точки верованих вісей в відповідній точці у відповідний момент часу, при цьому умовна точка може знаходитись в довільному місці) керованих вісей до кривої траєкторії пересування даної точки.
Звучить складно, але суть зводиться до того, що базу для моделювання траєкторій руху більшості сучасних машин можна відтворити у формі двох точок, в яких задня точка має незмінно поздовжньо спрямований до корпуса транспортного засобу вектор зсуву. З цієї ж причини вона змінює напрямок в залежності від зміни положення корпусу машини, а передня – змінює свій вектор за рішенням водія, але в межах можливого вивороту коліс керованої вісі.
З теорією ми завершили, переходимо до практики.
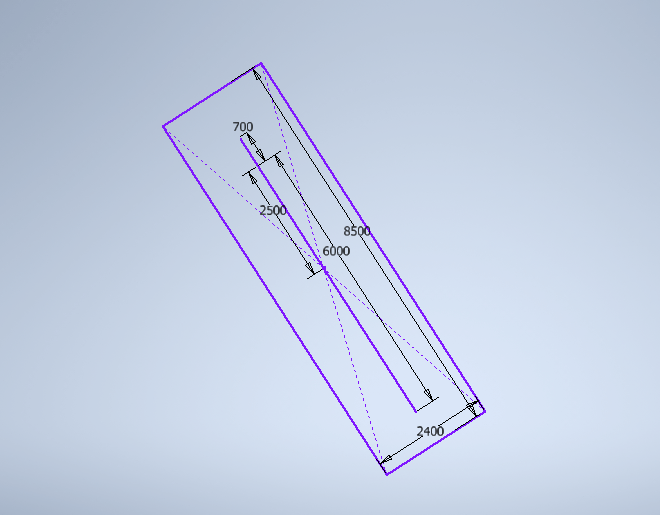
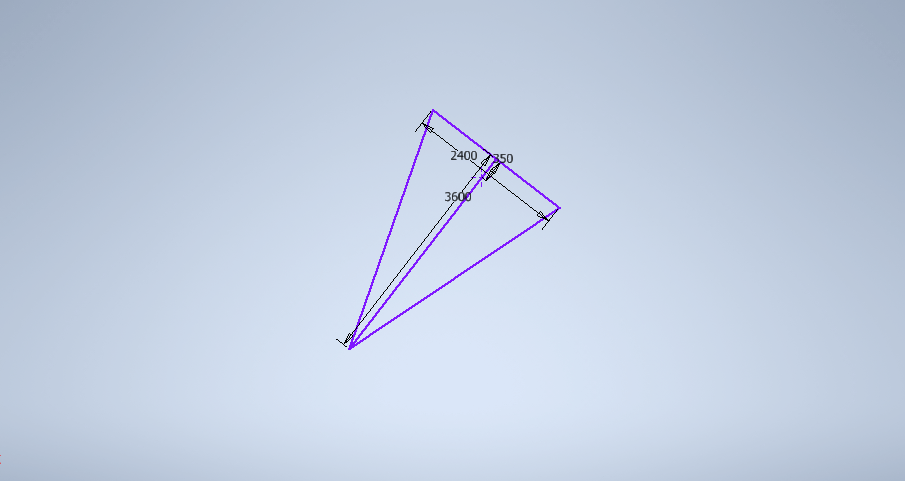
Спершу затвердимо схему транспортного засобу. Оскільки схема транспортного засобу може бути використана в демонстрації з імітуванням рухомого транспортного засобу, то рекомендуємо відразу створювати ескіз без прив’язок точок та ліній до напрямків координат чи конкретних координат і тим паче без фіксацій.
Дана схема обов’язково мусить враховувати:
- точку балансу некерованих вісей
- умовну точку керованих вісей
- усі потрібні точки з’єднань з сусідніми ланками (знадобиться для подальшого впровадження з’єднань сегментів багатосегментного транспортного засобу)
- безпосередні відстані між цим точками
- безпосередні залежності взаємних розташувань вищеописаних точок
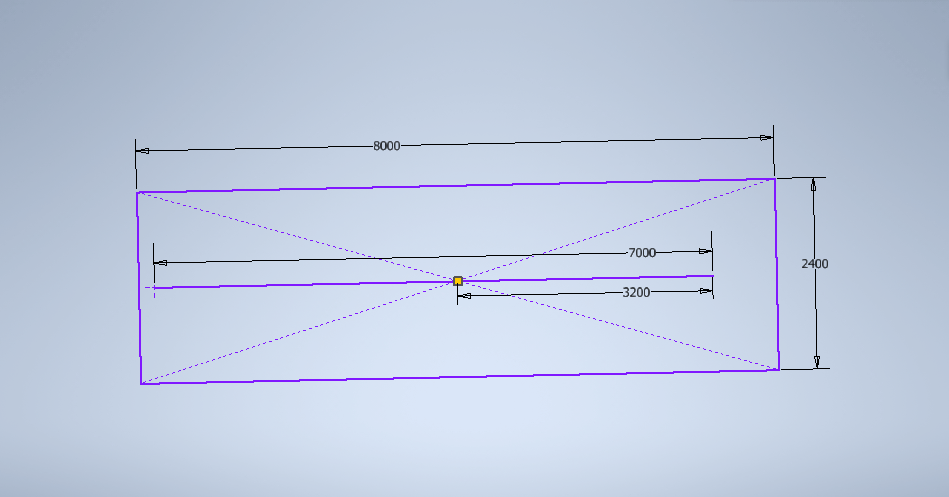
- спрощена проекція реальних габаритів транспортного засобу (ширина, довжина, виноси тощо). На демонстрації втілена простим прямокутником.
Маючи затверджену схему транспортного засобу, зберігаємо ескіз, приховуємо його та створюємо ескіз в тій же площині. Для аналізу проходжуваної траєкторії потрібна схема дорожньої мережі і розташування оточуючих об’єктів, що грають роль при аналізі. Схема мусить бути така, щоб була можливість орієнтуватись при ручному встановленні траєкторії руху умовної точки керованої вісі.

Коли все важливе оточуюче середовище враховане, рекомендую зберегти отриману схему окремим шаром та почати новий окремий ескіз на тій же площині. Тепер вручну прокладаємо траєкторію пересування умовної точки керованих вісей.
Для конструювання дотримання вивороту рекомендую приймати місцем розташування умовної точки керованих вісей середину між колесами крайньої з вісей, оскільки переважно обмеженим є виворот коліс крайньої вісі (виключенням можуть бути машини зі специфічним компонуванням). В жодній точці траєкторії радіус кривизни не мусить бути меншим, ніж це дозволяє можливий виворот коліс керованих вісей.
У випадку моделювання траєкторій руху з низькою швидкістю вважається нормальним задавати траєкторію як набір прямих відрізків зі скругленнями фіксованого радіусу. У випадку ж моделювання руху зі швидкістю орієнтовно 30км/год+ (радіус кривої по передній вісі 30м+), то перед кожною кривою рекомендується додавати до кривизни прогресію, що відображає деяку витрату часу на повертання керма і реакцію рульових механізмів, тобто поступову зміну кривизни проходжуваної кривої руху транспортного засобу.
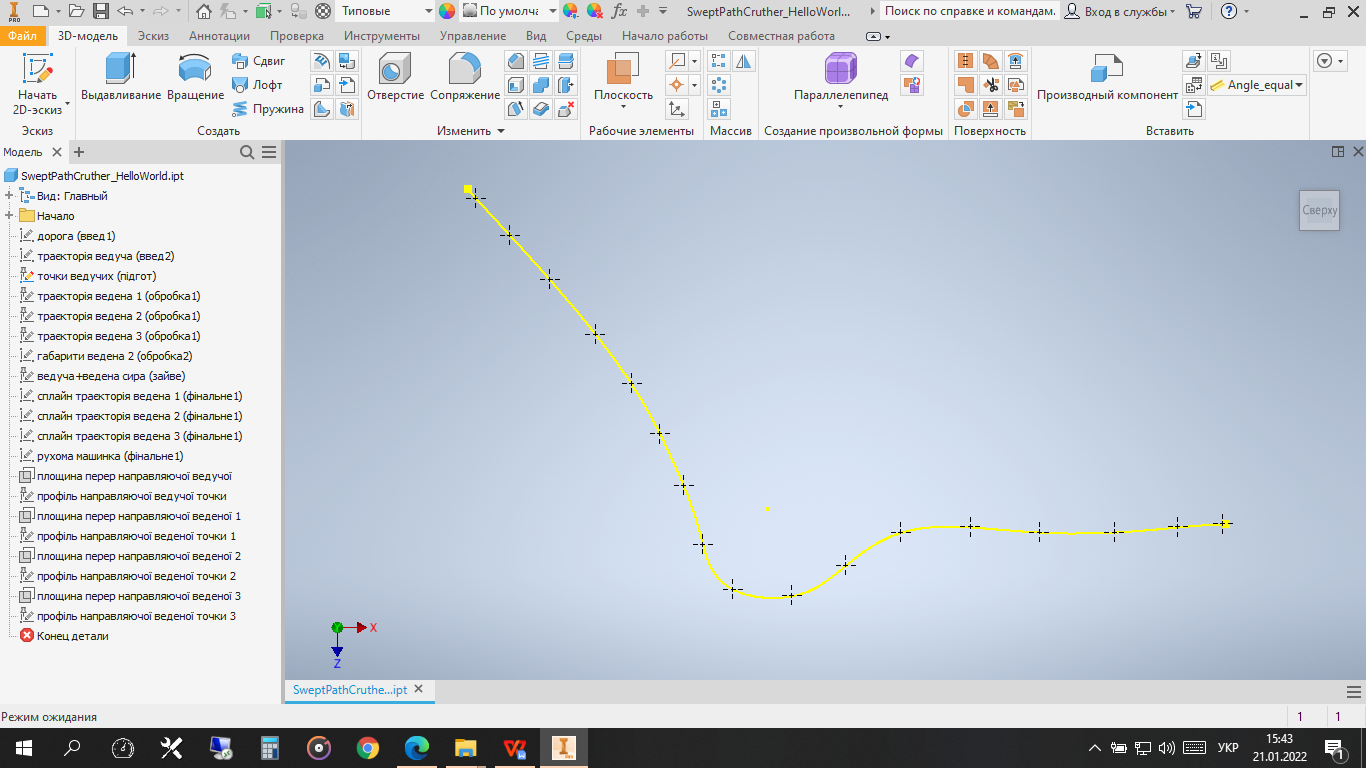
Також прийнятним вважається задання траєкторії умовної точки керованих вісей криволінійним сплайном з урахуванням вищеописаних факторів. Приклад задання траєкторії сплайном бачите на нижчевказаному зображенні.

Тепер розташовуємо на траєкторії руху умовної точки керованих вісей “відбитки” тих самих точок.
Розташовуйте за власним бажанням, але обов’язково додайте точки в самому початку та кінці. Враховуйте, що чим складніша траєкторія і чим тісніші умови маневрування, тим детальнішим мусить бути моделювання, тобто концентрація “відбитків” в таких місцях мусить бути щільнішою. Враховуйте, що видовжені транспортні засоби та транспортні засоби з причепами продовжують маневрувати після виїзду передніх вісей з зони ускладненого маневрування, тому розповсюджуйте підвищену щільність “відбитків” і з виносом до та після зон ускладненого маневрування на довжину, хоча б порівняну із загальною довжиною самого транспортного засобу.
Чим щільніше розташування “відбитків”, тим точнішим буде результат, але тим складніше буде виконання роботи.

Після того зберігаємо отриманий ескіз та створюємо ще один на тій же площині. Відкладаємо проєкції точок “відбитків” в новоствореному чистому ескізі та, за необхідності, фіксуємо спроеційовані точки.
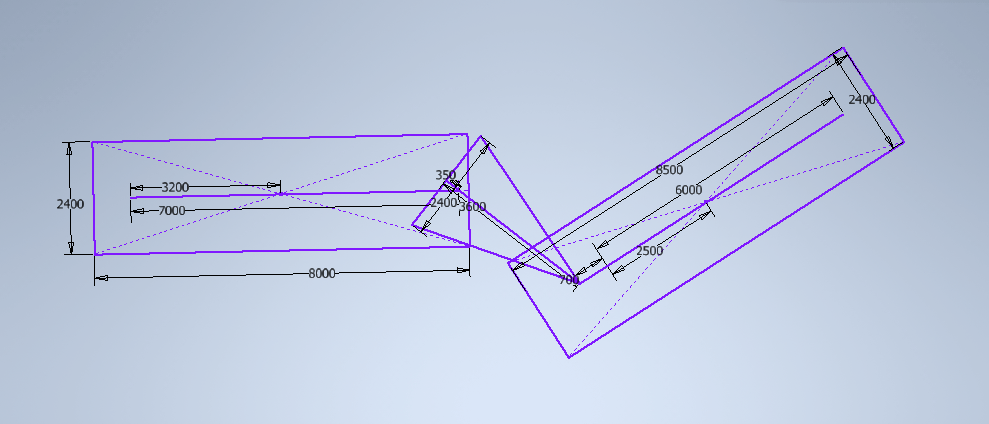
Згадуємо в раніше затвердженій схемі транспортного засобу відстань від умовної точки керованих вісей до точки балансу некерованих вісей, наприклад, в демонстрації до статті. Як показує затверджена схема транспортного засобу на зображені нижче, відстань складала 6 м. У вашій схемі буде своя відстань.
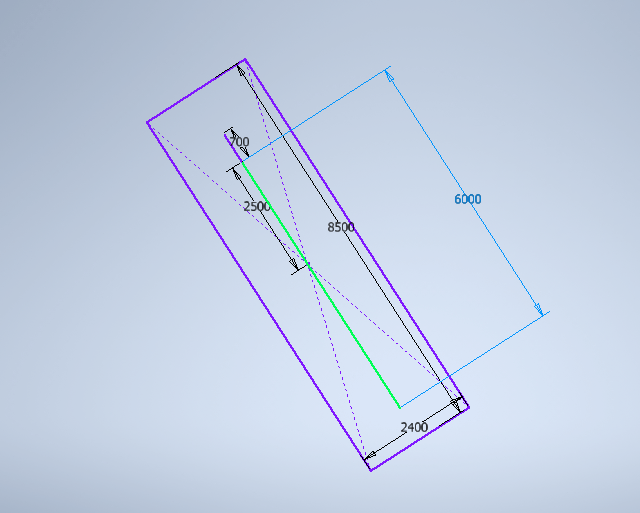
На ескізі зі спроеційованими точками відкладаємо від кожної точки відрізки, які рівні згаданій відстані між умовною точкою керованих вісей та точкою балансу некерованих вісей. Розташовуємо БЕЗ прив’язки відрізків до якого-небудь спрямування, навіть без взаємних залежностей. Тільки прив’язка одного з кінців кожного відрізка до відповідної точки та задана безпосередня довжина незалежно від спрямування відрізка.

Після цього фіксуємо відрізок, що сполучений з першою точкою за рухом в тому положенні, яке відповідає положенню транспортного засобу в прогнозованій ситуації. Відкладаємо від вільного кінця зафіксованого відрізка по дотичній дугу до вільного кінця наступного відрізка і встановлюємо залежність дотичності між дугою і приєднаним відрізком. В залежності від CAD-програми можуть виникати деякі “глюки” в момент задання дотичності до приєднаного відрізка. Це виправляється підправлянням напрямку приєднуваного відрізка для полегшення встановлення комп’ютером примусової дотичності. Тепер повторюємо так почергово від початку до кінця з усіма відрізками. Відрізки, окрім першого, можна не фіксувати (вони самі зафіксуються жорстким зв’язком залежностей).
Якщо схема транспортного засобу передбачала присутність точок з’єднань, то необхідно до кожного спрямованого відрізка або додати відповідні відрізочки в рамках того ж ескізу, як на демонстрації (знову ж таки, не прив’язуватись до вісей координат), або винести отримані відрізки проєкцією в окремий ескіз і вже там додати все потрібне.
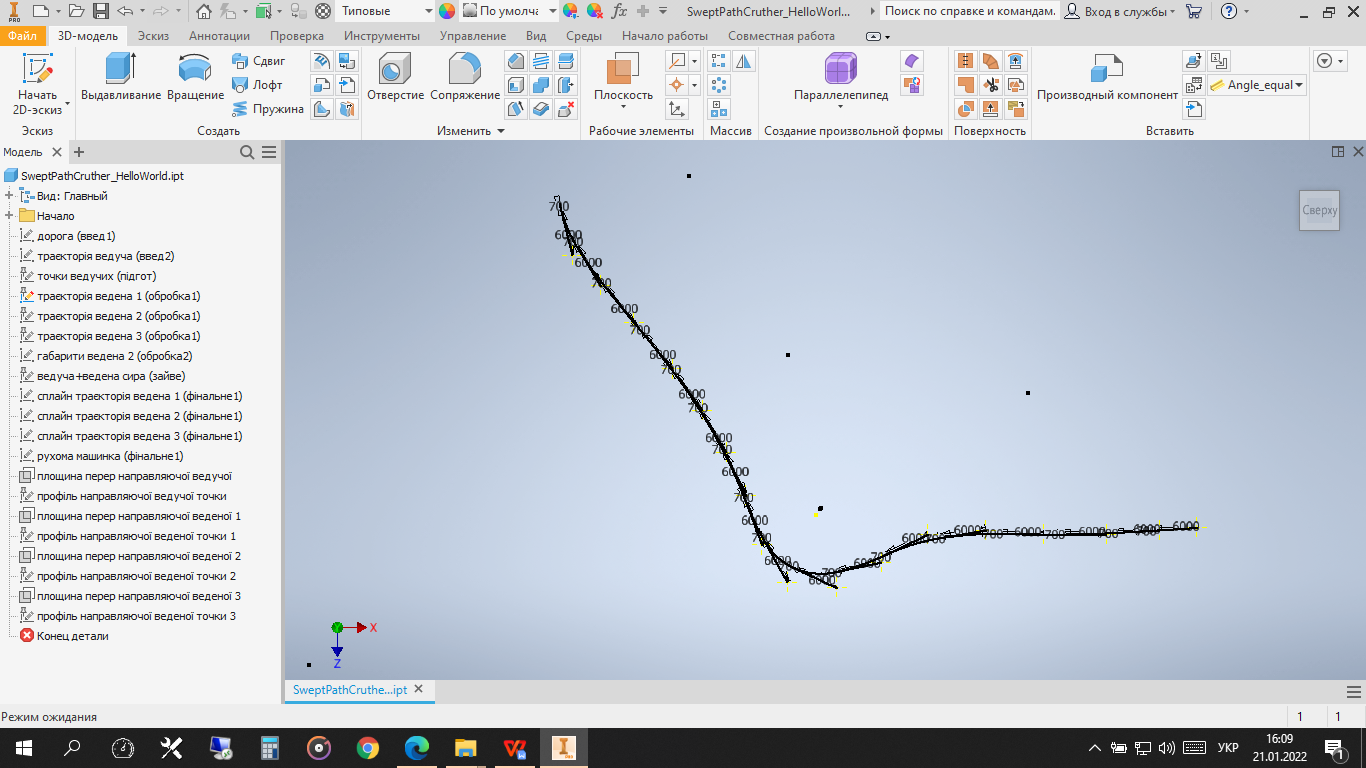
Отримавши “відбитки” положень корпуса і криву траєкторії пересування точки балансу некерованих вісей – окремим слайдом проеціюємо усі багатостраждальні дуги, отримані в попередньому етапі, і відкладаємо по ним один суцільний цілісний сплайн. Він знадобиться для імітації руху транспортного транспортного засобу.

Зрештою, маємо дві жадані криві, що визначають траєкторію транспортного засобу. Тепер достатньо на окремому ескізі зі спроеційованими сплайнами скопіювати схему транспортного засобу і підмкнути відповідні точки схеми до відповідних кривих траєкторій.
Тепер з цього можна отримати:
- Розставити з прив’язкою до сплайну безліч проєкцій транспортного засобу в різні моменти часу (чим більша щільність накладених проєкцій, тим наочніша троєкторія країв транспортного засобу);
- Імітувати пересування транспортного засобу елементарним перетягуванням за одну з точок попередньо прив’язаної до сплайнів схеми транспортного засобу.


Для демонстрації можливостей зайду трохи далі і таким чином продовжу методику з доданням причепів. Єдина відмінність – відповідні точки з’єднань причепів мусять зчеплюватись з проєкціями точок з’єднань попереднього транспортного засобу подібно умовним точкам керованих вісей.
По-перше, подібне компонування передбачає проміжну ланку у формі підкатного візка.
По-друге, подібне компонування передбачає сам причіп з віддаленою віссю.
Поєднавши три складових схеми, ми отримуємо отримано суцільну схему транспортного засобами з багатьма секціями.
Ця схема пов’язана зі сплайнами тільки в точках вісей, точки з’єднань діють суто всередині схеми.
Користуйтесь методикою на здоров’я, рекомендую попрактикуватись заздалегідь. Але якщо аналізувати подібне знадобиться часто, то раджу застосовувати Autodesk Vehicle Tracking як додаток до AutoCAD CIVIL 3D. Зі спеціалізованим софтом реалізація здійснюється набагато легше й швидше.

Автор: Богдан Будлянцев




0 комментар(і/ів):